Phân biệt Động cơ Servo, Động cơ Bước và Động cơ DC: Ứng dụng thực tế trong máy in 3D, cánh tay robot và xe tự hành
Trong thế giới truyền động cơ điện tử, việc chọn sai loại động cơ không chỉ làm giảm hiệu suất mà còn có thể đánh sập toàn bộ thiết kế cơ khí của một dự án. Động cơ DC, Động cơ Bước (Stepper) và Động cơ Servo là ba trụ cột chính, mỗi loại mang một triết lý thiết kế và phương thức điều khiển hoàn toàn khác biệt.
1. Động cơ DC (Direct Current Motor): Nền tảng của truyền động liên tục
- Bản chất và Đặc điểm:
- Đây là loại động cơ cơ bản nhất, hoạt động dựa trên từ trường tạo ra khi cấp dòng điện một chiều vào cuộn dây (rotor) nằm trong từ trường của nam châm vĩnh cửu (stator).
- Khi được cấp điện, động cơ DC sẽ quay liên tục. Điện áp càng cao, tốc độ quay (RPM) càng lớn.
- Đây là loại động cơ cơ bản nhất, hoạt động dựa trên từ trường tạo ra khi cấp dòng điện một chiều vào cuộn dây (rotor) nằm trong từ trường của nam châm vĩnh cửu (stator).
- Phương thức điều khiển:
- Tốc độ: Điều khiển bằng phương pháp băm xung PWM (Pulse Width Modulation) để thay đổi điện áp trung bình cấp vào động cơ.
- Chiều quay: Sử dụng mạch Cầu H (H-Bridge – ví dụ IC L298N) để đảo chiều dòng điện.
- Tốc độ: Điều khiển bằng phương pháp băm xung PWM (Pulse Width Modulation) để thay đổi điện áp trung bình cấp vào động cơ.
- Ưu điểm và Nhược điểm:
- Ưu điểm: Cấu tạo đơn giản, chi phí cực rẻ, cung cấp tốc độ vòng quay rất cao, dễ điều khiển.
- Nhược điểm: Không thể điều khiển vị trí chính xác. Khi ngắt điện, quán tính khiến trục động cơ tiếp tục trượt đi một đoạn.
- Ưu điểm: Cấu tạo đơn giản, chi phí cực rẻ, cung cấp tốc độ vòng quay rất cao, dễ điều khiển.
- Ứng dụng thực tế: Hệ thống dẫn động cho Xe tự hành (AGV/Rover)
- Trong xe tự hành hay robot hút bụi, hệ thống bánh xe dẫn động cần duy trì tốc độ quay liên tục để di chuyển quãng đường dài. Động cơ DC (thường có hộp số giảm tốc để tăng lực kéo – Gear DC Motor) là lựa chọn hoàn hảo. Việc bù trừ sai lệch quỹ đạo sẽ do cảm biến (La bàn số, Encoder quang học, Camera) báo về vi điều khiển để điều chỉnh tỷ lệ băm xung hai bên bánh xe.
- Trong xe tự hành hay robot hút bụi, hệ thống bánh xe dẫn động cần duy trì tốc độ quay liên tục để di chuyển quãng đường dài. Động cơ DC (thường có hộp số giảm tốc để tăng lực kéo – Gear DC Motor) là lựa chọn hoàn hảo. Việc bù trừ sai lệch quỹ đạo sẽ do cảm biến (La bàn số, Encoder quang học, Camera) báo về vi điều khiển để điều chỉnh tỷ lệ băm xung hai bên bánh xe.
2. Động cơ Bước (Stepper Motor): Chuyên gia định vị vòng hở
- Bản chất và Đặc điểm:
- Khác với DC quay liên tục, động cơ bước chia một vòng quay 360 độ thành nhiều “bước” (step) bằng nhau. Ví dụ: Loại NEMA 17 phổ biến có góc bước 1.8^\circ, tức là cần 200 bước để hoàn thành một vòng quay.
- Hoạt động bằng cách cấp điện lần lượt vào các cuộn dây stator từ trường (Phase) để hút các răng từ tính của rotor chuyển động theo từng nấc một.
- Khác với DC quay liên tục, động cơ bước chia một vòng quay 360 độ thành nhiều “bước” (step) bằng nhau. Ví dụ: Loại NEMA 17 phổ biến có góc bước 1.8^\circ, tức là cần 200 bước để hoàn thành một vòng quay.
- Phương thức điều khiển:
- Bắt buộc phải có mạch Driver chuyên dụng (như A4988, DRV8825, TMC2209). Vi điều khiển chỉ cần xuất 2 tín hiệu: Xung (STEP) để tiến 1 bước và Mức logic (DIR) để chọn chiều quay.
- Bắt buộc phải có mạch Driver chuyên dụng (như A4988, DRV8825, TMC2209). Vi điều khiển chỉ cần xuất 2 tín hiệu: Xung (STEP) để tiến 1 bước và Mức logic (DIR) để chọn chiều quay.
- Ưu điểm và Nhược điểm:
- Ưu điểm: Khả năng định vị cực kỳ chính xác. Có “Momen giữ” (Holding Torque) rất lớn, trục động cơ bị khóa cứng khi đứng yên. Không cần cảm biến vị trí phản hồi.
- Nhược điểm: Momen xoắn giảm mạnh khi chạy ở tốc độ cao. Gây tiếng ồn và hiện tượng cộng hưởng (rung). Đặc biệt, vì là hệ thống điều khiển vòng hở (Open-loop), nếu động cơ bị kẹt và “trượt bước”, vi điều khiển sẽ không hề hay biết, dẫn đến sai số tích lũy.
- Ưu điểm: Khả năng định vị cực kỳ chính xác. Có “Momen giữ” (Holding Torque) rất lớn, trục động cơ bị khóa cứng khi đứng yên. Không cần cảm biến vị trí phản hồi.
- Ứng dụng thực tế: Trục chuyển động của Máy in 3D và Máy CNC
- Máy in 3D cần di chuyển đầu phun nhựa theo các tọa độ X, Y, Z với độ chính xác phần mười milimet. Động cơ bước cho phép tịnh tiến đầu in đúng khoảng cách mong muốn một cách dễ dàng và chi phí thấp, vì tải trọng của đầu in thường nhẹ và cố định, hiếm khi xảy ra hiện tượng trượt bước.
- Máy in 3D cần di chuyển đầu phun nhựa theo các tọa độ X, Y, Z với độ chính xác phần mười milimet. Động cơ bước cho phép tịnh tiến đầu in đúng khoảng cách mong muốn một cách dễ dàng và chi phí thấp, vì tải trọng của đầu in thường nhẹ và cố định, hiếm khi xảy ra hiện tượng trượt bước.
3. Động cơ Servo (Servo Motor): Đỉnh cao của điều khiển vòng kín
- Bản chất và Đặc điểm:
- Servo thực chất không phải là một loại động cơ vật lý độc lập. Nó là một hệ thống bao gồm 3 phần: Một động cơ (có thể là DC, AC, hoặc BLDC), một cảm biến đo vị trí/tốc độ (Encoder/Potentiometer), và một mạch điều khiển thông minh tích hợp sẵn.
- Servo thực chất không phải là một loại động cơ vật lý độc lập. Nó là một hệ thống bao gồm 3 phần: Một động cơ (có thể là DC, AC, hoặc BLDC), một cảm biến đo vị trí/tốc độ (Encoder/Potentiometer), và một mạch điều khiển thông minh tích hợp sẵn.
- Phương thức điều khiển:
- Hoạt động dựa trên nguyên lý điều khiển vòng kín (Closed-loop). Vi điều khiển gửi lệnh yêu cầu động cơ đến góc 90^\circ. Mạch Servo sẽ cấp điện cho động cơ quay, đồng thời liên tục đọc cảm biến. Nếu trục bị lệch đi do ngoại lực, Servo sẽ tự động tính toán cấp thêm dòng điện để ghì trục về đúng tọa độ 90^\circ.
- Hoạt động dựa trên nguyên lý điều khiển vòng kín (Closed-loop). Vi điều khiển gửi lệnh yêu cầu động cơ đến góc 90^\circ. Mạch Servo sẽ cấp điện cho động cơ quay, đồng thời liên tục đọc cảm biến. Nếu trục bị lệch đi do ngoại lực, Servo sẽ tự động tính toán cấp thêm dòng điện để ghì trục về đúng tọa độ 90^\circ.
- Phân loại nhanh:
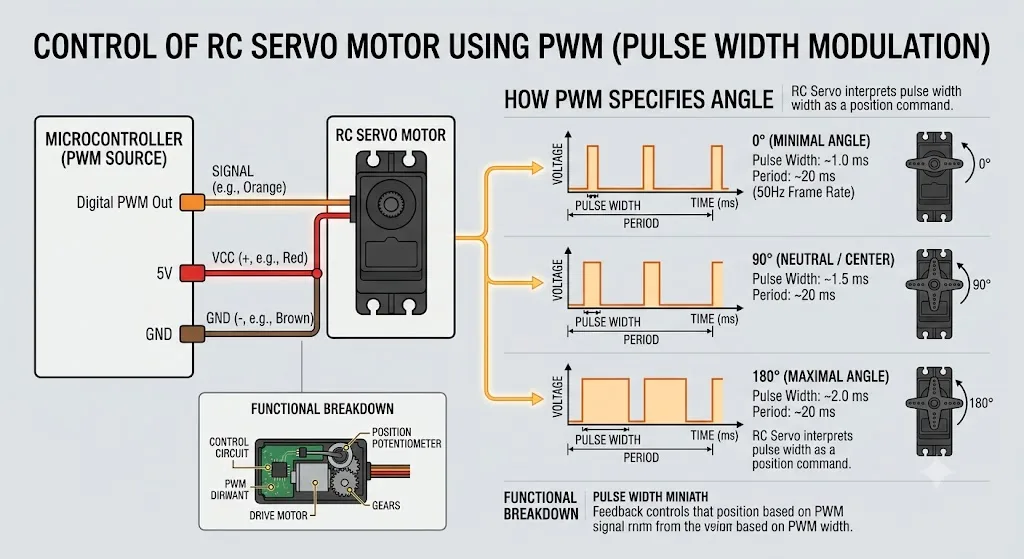
- Hobby Servo (RC Servo – SG90, MG996R): Dùng biến trở, quay giới hạn 180^\circ hoặc 270^\circ, điều khiển bằng độ rộng xung PWM chuyên biệt (1ms – 2ms).
- Industrial Servo (AC/DC Servo công nghiệp): Dùng Encoder quang học có độ phân giải hàng chục nghìn xung/vòng, quay liên tục tốc độ cao, dùng giao thức truyền thông phức tạp (CAN, EtherCAT).
- Hobby Servo (RC Servo – SG90, MG996R): Dùng biến trở, quay giới hạn 180^\circ hoặc 270^\circ, điều khiển bằng độ rộng xung PWM chuyên biệt (1ms – 2ms).
- Ưu điểm và Nhược điểm:
- Ưu điểm: Độ chính xác tuyệt đối, không bao giờ bị trượt bước. Phản hồi cực nhanh, duy trì momen xoắn cao ở cả tốc độ thấp và cao.
- Nhược điểm: Cấu trúc phức tạp, giá thành rất đắt đỏ. Cần kỹ năng tinh chỉnh thuật toán PID phức tạp để động cơ không bị dao động (hunting) quanh điểm dừng.
- Ưu điểm: Độ chính xác tuyệt đối, không bao giờ bị trượt bước. Phản hồi cực nhanh, duy trì momen xoắn cao ở cả tốc độ thấp và cao.
- Ứng dụng thực tế: Các khớp nối của Cánh tay Robot công nghiệp
- Cánh tay robot phải gắp vật nặng nhẹ khác nhau ở nhiều tư thế, momen xoắn tác động lên các khớp thay đổi liên tục. Động cơ Servo có khả năng “cảm nhận” sự thay đổi tải trọng này và tự động tăng/giảm dòng điện để giữ cánh tay chính xác ở tọa độ mục tiêu mà không bị xệ xuống.
- Cánh tay robot phải gắp vật nặng nhẹ khác nhau ở nhiều tư thế, momen xoắn tác động lên các khớp thay đổi liên tục. Động cơ Servo có khả năng “cảm nhận” sự thay đổi tải trọng này và tự động tăng/giảm dòng điện để giữ cánh tay chính xác ở tọa độ mục tiêu mà không bị xệ xuống.
4. Bảng so sánh tổng hợp các loại động cơ
| Đặc tính | Động cơ DC | Động cơ Bước | Động cơ Servo |
|---|---|---|---|
| Cơ chế điều khiển | Liên tục | Từng bước (Vòng hở) | Tỷ lệ (Vòng kín) |
| Độ chính xác vị trí | Thấp (Cần thêm Encoder) | Cao (Phụ thuộc góc bước) | Tuyệt đối (Có phản hồi) |
| Momen ở tốc độ cao | Cao | Rất thấp (Giảm dần theo tốc độ) | Rất cao (Duy trì ổn định) |
| Momen giữ (Đứng yên) | Không có | Có (Rất mạnh) | Có (Chủ động bù trừ tải) |
| Mức độ phức tạp / Giá | Đơn giản / Rẻ nhất | Trung bình / Rẻ | Phức tạp / Đắt nhất |
| Ứng dụng tiêu biểu | Xe mô hình, Bơm nước, Quạt | Máy in 3D, CNC laser, Máy quấn dây | Robot công nghiệp, Máy CNC cao cấp |
Để lại một bình luận