Phần 1: Điều khiển Cánh tay Robot (Robotic Manipulator)
1. Các khái niệm Cơ học cốt lõi
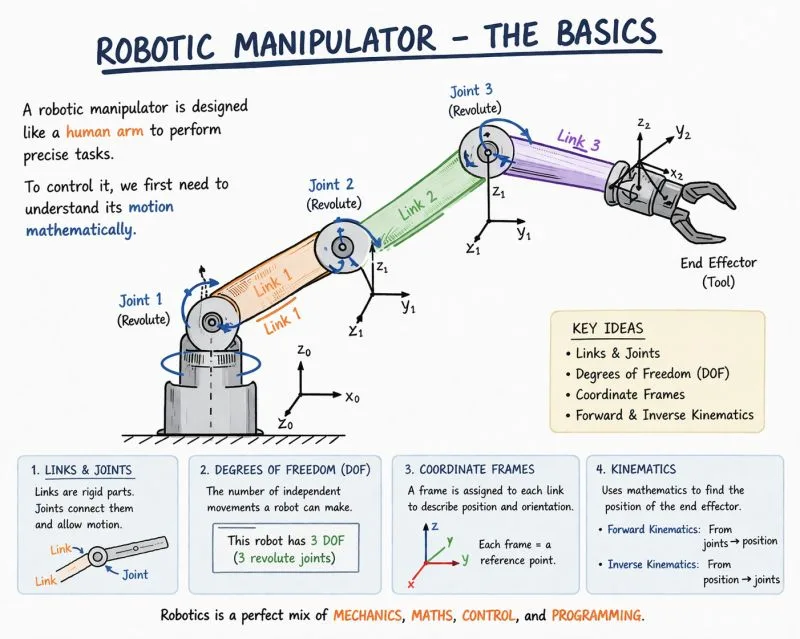
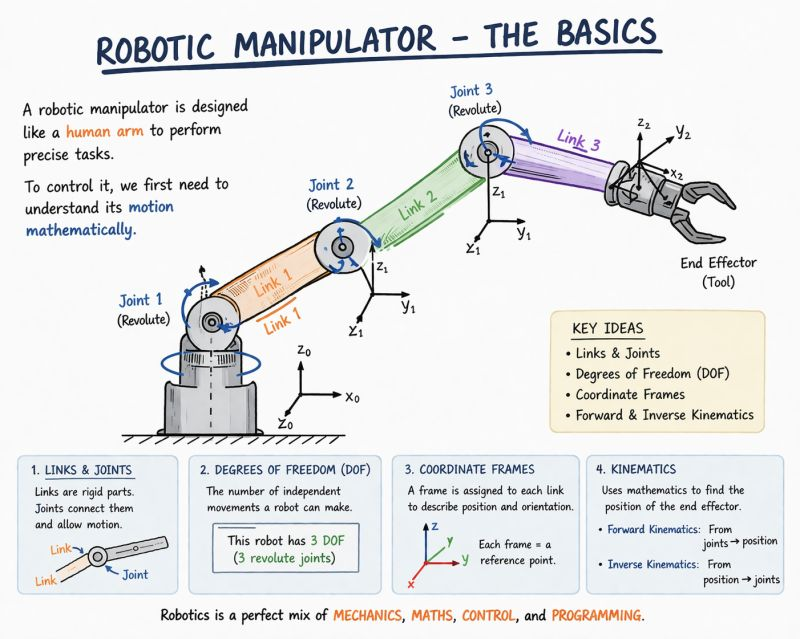
- Links (Khớp nối) và Joints (Khớp chuyển động):
- Links: Các thanh liên kết cứng, đóng vai trò như “xương” của robot. Để tối ưu trọng lượng cho các mô hình để bàn, Links thường được gia công bằng nhôm hoặc in 3D (dùng nhựa chịu lực như PETG, ABS).
- Joints: Điểm kết nối cho phép các Links chuyển động. Có hai loại chính: Khớp quay (Revolute joint – chuyển động góc) và Khớp tịnh tiến (Prismatic joint – chuyển động trượt thẳng).
- Bậc tự do (Degrees of Freedom – DOF):
- Là số lượng các chuyển động độc lập mà robot có thể thực hiện. Hình ảnh anh gửi là một robot 3 DOF (gồm 3 khớp quay).
- Trong công nghiệp, cánh tay 6 DOF là tiêu chuẩn vàng vì nó có thể mô phỏng hoàn toàn chuyển động của cánh tay người (đạt được mọi tọa độ X, Y, Z và xoay cổ tay theo 3 trục Roll, Pitch, Yaw).
- End Effector (Cơ cấu tác động cuối):
- “Bàn tay” của robot. Tùy vào nhiệm vụ, nó có thể là kẹp cơ khí (Gripper), giác hút chân không, đầu hàn, hoặc đầu phun máy in 3D.
2. Toán học điều khiển: Động học (Kinematics)
Đây là phần cốt lõi và phức tạp nhất trong việc lập trình điều khiển cánh tay robot. Nó giải quyết bài toán liên hệ giữa góc quay của các động cơ và vị trí thực tế của End Effector trong không gian (Hệ trục tọa độ – Coordinate Frames).
- Động học thuận (Forward Kinematics – FK):
- Bài toán: Nếu biết trước góc xoay của từng động cơ (Khớp 1 xoay 30 độ, Khớp 2 xoay 45 độ…), hãy tính toán xem đầu gắp (End Effector) đang nằm ở tọa độ (X, Y, Z) nào.
- Ứng dụng: Tương đối dễ tính toán bằng ma trận biến đổi đồng nhất (Denavit-Hartenberg parameters). Dùng để vẽ mô phỏng vị trí robot trên màn hình hiển thị.
- Động học nghịch (Inverse Kinematics – IK):
- Bài toán: Nếu muốn đầu gắp di chuyển đến đúng tọa độ (X=10, Y=20, Z=15) để gắp vật, các khớp động cơ phải xoay một góc bao nhiêu độ?
- Tính chất: Đây là bài toán cực kỳ phức tạp vì thường có nhiều nghiệm (ví dụ: khuỷu tay có thể gập lên hoặc gập xuống nhưng bàn tay vẫn chạm cùng một điểm).
- Giải pháp phần cứng: Việc giải các phương trình lượng giác ma trận phức tạp này theo thời gian thực đòi hỏi năng lực tính toán cao. Thông thường, một máy tính nhúng trung tâm (như Raspberry Pi 4) sẽ đảm nhận việc giải IK, sau đó gửi các góc mục tiêu (Target Angles) xuống cho vi điều khiển cấp thấp (như ESP32, Arduino) để xuất xung điều khiển động cơ.
3. Hệ thống truyền động và Điều khiển thấp tầng (Low-level Control)
- Động cơ Bước (Stepper Motor) kết hợp Hộp giảm tốc:
- Dùng cho các cánh tay cần độ chính xác cao và chịu tải nặng. Thường kết hợp với các bộ truyền động đai hoặc hộp số Harmonic để loại bỏ độ rơ cơ khí (Backlash).
- Động cơ Servo (RC Servo & Smart Servo):
- RC Servo (PWM): Dùng trong các mô hình học tập nhỏ nhẹ, giá rẻ nhưng độ chính xác kém, không có phản hồi vị trí thực.
- Smart/Serial Servo: Dùng giao tiếp Serial (UART/RS485), cho phép đọc lại vị trí góc quay hiện tại, dòng điện và nhiệt độ. Đây là tiêu chuẩn cho các robot để bàn cao cấp.
4. Các mô hình Cánh tay Robot thực tế điển hình
4.1. Phân khúc Công nghiệp (Industrial Robots)
- Articulated Robot (Cánh tay đa khớp):
- Cấu trúc: Thường có 6 DOF, hoạt động giống cánh tay người.
- Đại diện: Các dòng máy của KUKA, Yaskawa, FANUC. Ứng dụng để hàn ô tô, sơn, bốc xếp hàng hóa.
- SCARA (Selective Compliance Assembly Robot Arm):
- Cấu trúc: 4 DOF, chuyển động cực kỳ nhanh nhẹn trên mặt phẳng ngang (trục X, Y) và cứng vững ở trục Z (lên xuống).
- Đại diện: Epson, Yamaha. Ứng dụng chủ yếu trong dây chuyền gắp thả (Pick-and-Place) linh kiện điện tử, lắp ráp vi mạch.
- Delta Robot:
- Cấu trúc: 3 cánh tay hình nhện kết nối vào một đế trung tâm.
- Đặc tính: Trọng lượng phần chuyển động cực nhẹ, cho tốc độ gắp thả nhanh nhất thế giới (lên tới 300 sản phẩm/phút). Thường dùng trong phân loại thực phẩm, đóng gói.
4.2. Phân khúc Máy tính để bàn & Mã nguồn mở (Desktop / Open-Source) Đây là các mô hình lý tưởng để nghiên cứu, tự in 3D và lập trình thử nghiệm thuật toán trước khi làm quy mô lớn.
- Niryo One / Niryo Ned: Cánh tay 6 DOF mã nguồn mở sử dụng Raspberry Pi chạy hệ điều hành ROS (Robot Operating System) kết hợp với động cơ bước. Rất nổi tiếng trong giáo dục STEM và đại học.
- Thor Robot Arm: Một dự án in 3D hoàn toàn, mã nguồn mở, kích thước khá lớn, sử dụng động cơ bước Nema 17.
- EEZYbotARM / MeArm: Các thiết kế cơ bản 3-4 DOF, sử dụng RC Servo nhỏ, được cắt laser hoặc in 3D, rất phù hợp để thực hành viết code PWM trên Arduino.
Phần 2: Điều khiển Cánh tay Robot: Động học Thuận (FK) và Động học Nghịch (IK)
Trong lĩnh vực chế tạo và lập trình robot, việc gửi tín hiệu xung PWM (Pulse Width Modulation) để làm quay một động cơ là bài toán điện tử cơ bản. Tuy nhiên, để phối hợp hàng loạt động cơ nhằm đưa “bàn tay” robot (End Effector) gắp chính xác một linh kiện ở tọa độ không gian 3 chiều lại là một bài toán toán học phức tạp.
Hệ thống toán học chịu trách nhiệm cho việc này được gọi là Động học (Kinematics). Trong kỹ thuật robot, hệ thống này được chia làm hai trụ cột chính: Động học Thuận (Forward Kinematics – FK) và Động học Nghịch (Inverse Kinematics – IK).
1. Động học Thuận (Forward Kinematics – FK)
Định nghĩa và Bản chất
Động học thuận là quá trình tính toán vị trí và góc nghiêng của điểm tác động cuối (End Effector) trong không gian, dựa trên các giá trị góc quay (hoặc độ dịch chuyển) đã biết của từng khớp động cơ.
Nói một cách đơn giản, nếu hệ thống đã biết chính xác động cơ số 1 đang xoay $30^\circ$, động cơ số 2 xoay $45^\circ$, bài toán FK sẽ trả lời câu hỏi: “Đầu gắp của robot hiện đang nằm ở tọa độ $(x, y, z)$ nào?”.
Phương pháp tính toán: Hệ quy chiếu Denavit-Hartenberg (D-H)
Trong công nghiệp, phương pháp tiêu chuẩn để giải bài toán FK là sử dụng tham số Denavit-Hartenberg (D-H). Phương pháp này gán cho mỗi khớp một hệ trục tọa độ cục bộ. Ma trận biến đổi đồng nhất (Homogeneous Transformation Matrix) sẽ được sử dụng để dịch chuyển từ gốc tọa độ của trục này sang trục tiếp theo.
Mỗi liên kết cơ khí được đặc trưng bởi 4 thông số D-H:
- Chiều dài liên kết ($a$): Khoảng cách dọc theo trục $x$.
- Góc xoắn liên kết ($\alpha$): Góc quay quanh trục $x$.
- Độ lệch khớp ($d$): Khoảng cách dọc theo trục $z$.
- Góc khớp ($\theta$): Góc quay quanh trục $z$.
Ma trận biến đổi từ khớp $i-1$ đến khớp $i$ được định nghĩa bằng công thức:
$$T_{i}^{i-1} = \begin{bmatrix} \cos\theta_i & -\sin\theta_i\cos\alpha_i & \sin\theta_i\sin\alpha_i & a_i\cos\theta_i \\ \sin\theta_i & \cos\theta_i\cos\alpha_i & -\cos\theta_i\sin\alpha_i & a_i\sin\theta_i \\ 0 & \sin\alpha_i & \cos\alpha_i & d_i \\ 0 & 0 & 0 & 1 \end{bmatrix}$$
Để tìm tọa độ cuối cùng, bộ xử lý trung tâm chỉ cần nhân chuỗi các ma trận này lại với nhau từ gốc (Base) đến ngọn (End Effector).
Đặc điểm kỹ thuật của FK
- Tính toán rất nhanh và tuyến tính.
- Chỉ có một nghiệm duy nhất (với một tư thế các khớp, đầu gắp chỉ có thể nằm ở một vị trí duy nhất).
- Ứng dụng thực tế: Dùng để xác nhận lại vị trí thực của robot thông qua dữ liệu đọc về từ Encoder của động cơ, hoặc dùng để vẽ mô phỏng robot theo thời gian thực trên màn hình điều khiển.
2. Động học Nghịch (Inverse Kinematics – IK)
Định nghĩa và Bản chất
Động học nghịch là bài toán ngược lại, và cũng là bài toán quan trọng nhất trong việc điều khiển tự động. Khi hệ thống nhận được lệnh: “Hãy di chuyển đầu gắp đến tọa độ $(X=10, Y=20, Z=15)$”, bài toán IK sẽ tính toán xem từng khớp động cơ phải xoay một góc bao nhiêu độ ($\theta_1, \theta_2, \dots$) để đạt được tọa độ đó.
Những thách thức kỹ thuật của IK
Khác với FK, toán học trong IK không mang tính tuyến tính và cực kỳ phức tạp đối với vi điều khiển. Các kỹ sư điện tử khi lập trình IK thường phải đối mặt với 3 rào cản lớn:
- Đa nghiệm (Multiple Solutions): Để chạm đến một điểm, robot có thể có nhiều tư thế khác nhau. Ví dụ, khuỷu tay có thể gập lên (Elbow up) hoặc gập xuống (Elbow down). Thuật toán phải đủ thông minh để chọn nghiệm giúp robot không bị va chạm vào chướng ngại vật hoặc va vào chính thân của nó.
- Không có nghiệm (No Solutions): Tọa độ yêu cầu nằm ngoài tầm với (Workspace) của cơ khí cánh tay. Hệ thống phải nhận diện được để báo lỗi, tránh việc cố gắng xoay làm quá tải động cơ.
- Điểm kỳ dị (Singularities): Là các trạng thái mà hai hoặc nhiều trục của robot bị trùng nhau (hiện tượng Gimbal lock). Tại điểm này, robot bị mất một hoặc nhiều bậc tự do, khiến hệ phương trình bị chia cho 0, làm hệ thống điều khiển bị treo hoặc động cơ quay với tốc độ vô cực để bù trừ.
Các phương pháp giải bài toán IK
Trong thực tiễn lập trình, có hai trường phái chính để giải bài toán Động học nghịch:
- Phương pháp Giải tích (Analytical/Geometric Method):Sử dụng các định lý hình học không gian (như định lý hàm số Cosin) để tìm ra công thức đại số trực tiếp tính góc.Ví dụ, để tính góc của một cánh tay 2 khớp đơn giản trên mặt phẳng:$$\cos(\theta_2) = \frac{x^2 + y^2 – L_1^2 – L_2^2}{2L_1L_2}$$Phương pháp này tính toán cực kỳ nhanh, phù hợp cho các vi điều khiển cấp thấp (như Arduino, ESP32). Tuy nhiên, nó chỉ áp dụng được cho các robot có số bậc tự do thấp (3 đến 4 DOF) và cơ khí được thiết kế theo các tiêu chuẩn hình học đặc biệt (như 3 trục cổ tay cắt nhau tại một điểm).
- Phương pháp Số học (Numerical Method):Sử dụng các thuật toán lặp (như Newton-Raphson, Gradient Descent) kết hợp với Ma trận Jacobian nghịch đảo ($J^{-1}$) để liên tục tính sai số và nhích dần các khớp cho đến khi đạt được mục tiêu. Phương pháp này áp dụng được cho mọi loại robot phức tạp (6 DOF trở lên), nhưng đòi hỏi năng lực xử lý dấu phẩy động (Floating-point) rất lớn.
3. Kiến trúc hệ thống điều khiển thực tiễn
Để giải quyết bài toán Động học (đặc biệt là IK) trên các cánh tay robot công nghiệp hoặc robot để bàn chuyên nghiệp, cấu trúc phần cứng thường không dựa vào một vi điều khiển đơn lẻ mà được phân cấp rõ ràng:
| Cấp độ | Thiết bị phần cứng | Vai trò trong hệ thống Động học |
| Bậc cao (High-level) | Máy tính nhúng (Raspberry Pi, NVIDIA Jetson) hoặc PC công nghiệp | Chạy hệ điều hành Linux/ROS. Sử dụng các thư viện như MoveIt để giải quyết bài toán IK phức tạp bằng phương pháp Số học. Tránh các điểm kỳ dị và lập kế hoạch quỹ đạo (Trajectory Planning). |
| Bậc thấp (Low-level) | Vi điều khiển thời gian thực (STM32, ESP32, Teensy) | Nhận các góc mục tiêu ($\theta$) đã được máy tính tính toán sẵn. Biến đổi góc thành số lượng xung (Pulse) xuất ra các Driver động cơ bước (như TMC2209) hoặc giao tiếp UART với Servo để thực thi chuyển động mượt mà. |
Việc tách bạch rõ ràng giữa xử lý toán học (trên vi xử lý mạnh) và thực thi I/O thời gian thực (trên vi điều khiển) là tiêu chuẩn thiết kế bắt buộc, giúp hệ thống không bị khựng hoặc sập (crash) khi phải xử lý lượng dữ liệu ma trận khổng lồ của bài toán Động học.
Để lại một bình luận