3 hệ sinh thái Cánh tay Robot mã nguồn mở: Từ nhập môn đến chuẩn công nghiệp
Trong cộng đồng điện tử và chế tạo (Maker), việc tự chế tạo một cánh tay robot không còn là điều viển vông nhờ vào sự phát triển của hệ sinh thái mã nguồn mở. Dưới đây là phân tích kỹ thuật chi tiết về 3 dự án cánh tay robot tiêu biểu nhất, đại diện cho 3 phân khúc từ cơ bản, tầm trung đến cấp độ nghiên cứu R&D.
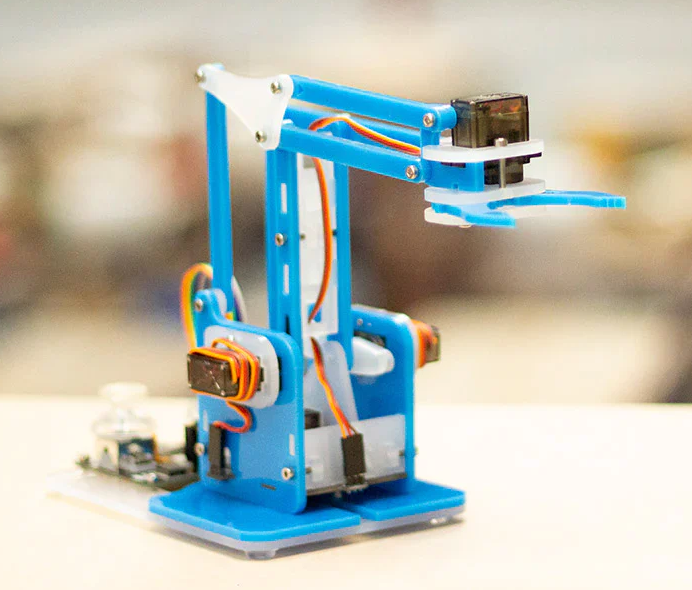
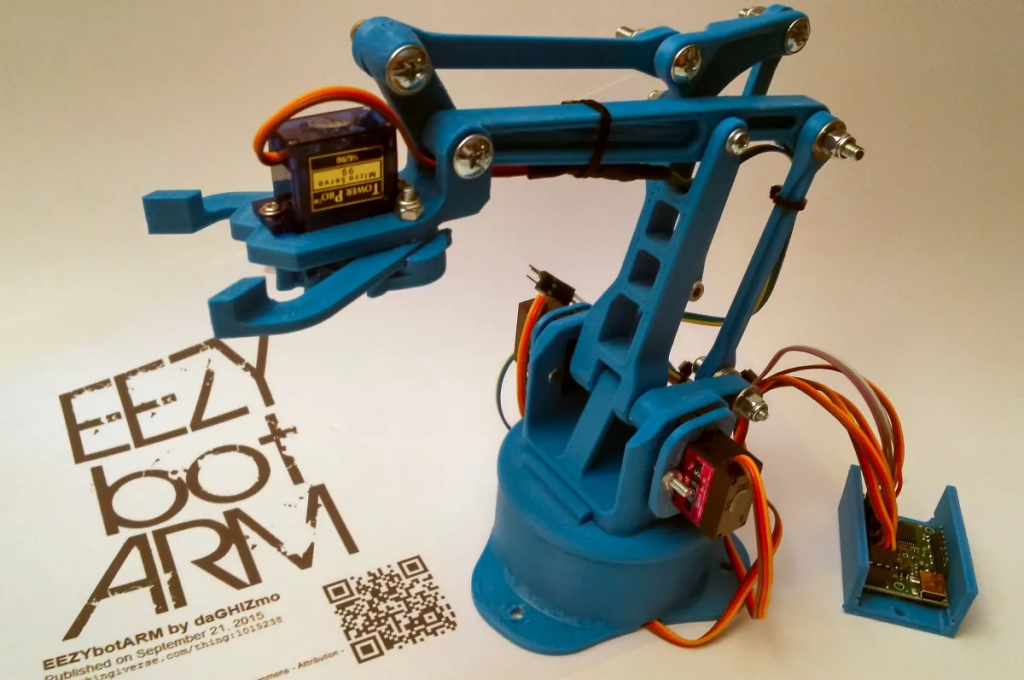
1. Phân khúc Nhập môn: MeArm và EEZYbotARM (Tối ưu cho việc học PWM)
Đây là các dự án kinh điển dành cho học sinh, sinh viên năm nhất hoặc những người mới bắt đầu làm quen với vi điều khiển. Chúng tập trung vào việc giải quyết bài toán truyền động cơ bản nhất: Biến tín hiệu điện thành chuyển động cơ học đơn giản.
- Đặc điểm cơ khí: * Cả hai đều sở hữu cấu trúc 4 bậc tự do (4 DOF), mô phỏng các chuyển động cơ bản của máy xúc hoặc tay gắp đơn giản: Xoay đế, nâng/hạ vai, vươn khuỷu và đóng/mở ngàm.
- MeArm: Được thiết kế chủ yếu để cắt Laser (dùng vật liệu Mica/Acrylic hoặc gỗ ép 3mm). Thiết kế này cực kỳ rẻ, có thể gia công hàng loạt.
- EEZYbotARM: Các phiên bản (như MK1, MK2) được tối ưu hóa hoàn toàn cho công nghệ in 3D FDM. Cơ cấu truyền động sử dụng các thanh giằng song song (parallel linkage) giúp đầu gắp luôn giữ được phương ngang cố định bất kể cánh tay vươn ra sao.
- Cơ cấu chấp hành (Actuators):
- Sử dụng 100% động cơ RC Servo (như SG90 vi mạch nhựa hoặc MG996R bánh răng kim loại).
- Ưu điểm là RC Servo đã tích hợp sẵn hộp giảm tốc và mạch điều khiển góc kín (Closed-loop) cơ bản bên trong. Người dùng không cần mua thêm Driver bên ngoài.
- Nền tảng điều khiển:
- Hoạt động hoàn hảo với Arduino UNO hoặc Nano.
- Người dùng chỉ cần sử dụng thư viện
Servo.h, xuất xung PWM (Pulse Width Modulation) để ra lệnh cho động cơ quay đến các góc từ 0 đến 180 độ.
- Hạn chế kỹ thuật:
- Độ rơ cơ khí (Backlash) lớn do sử dụng bánh răng nhựa giá rẻ.
- Hiện tượng “Jitter” (tay máy bị rung bần bật khi giữ nguyên vị trí) rất phổ biến do nhiễu xung PWM hoặc nguồn điện không đủ dòng (Ampe). Hoàn toàn không có khả năng tính toán động học (Kinematics) chính xác.
2. Phân khúc Tầm trung: Thor Robot Arm (Cỗ máy hạng nặng cho giới DIY)
Thor Robot Arm là một bước nhảy vọt về quy mô và độ phức tạp, nhắm tới các Maker có kinh nghiệm về máy in 3D và kiến thức cơ điện tử vững vàng. Đây là một dự án nổi tiếng trên diễn đàn Hackaday, mang dáng dấp của một cánh tay robot công nghiệp thu nhỏ.
- Đặc điểm cơ khí:
- Sở hữu 6 bậc tự do (6 DOF), cho phép End Effector tiếp cận một điểm trong không gian ở bất kỳ góc nghiêng nào.
- Kích thước lớn, tầm với (Reach) có thể lên tới hơn 60cm. Cấu trúc là sự kết hợp giữa các chi tiết nhựa in 3D cỡ lớn (thường yêu cầu in bằng nhựa PETG hoặc ABS để đảm bảo độ cứng) và các ống nhôm/thép định hình làm trục chịu lực.
- Cơ cấu chấp hành (Actuators):
- Thay vì RC Servo yếu ớt, Thor sử dụng động cơ bước công nghiệp cỡ nhỏ (Nema 17 và Nema 23).
- Điểm đặc biệt của Thor là hệ thống hộp giảm tốc hành tinh (Planetary Gearbox) được in 3D và tích hợp thẳng vào các khớp. Việc này giúp tăng lực mô-men xoắn (Torque) lên gấp nhiều lần, cho phép cánh tay nâng được vật nặng (Payload) từ 500g đến 1kg.
- Nền tảng điều khiển:
- Thường sử dụng các bo mạch điều khiển của máy in 3D (như RAMPS 1.4 hoặc các board 32-bit của BIGTREETECH) kết hợp với các mạch Driver A4988 hoặc TMC2209.
- Do động cơ bước không có phản hồi vị trí ban đầu (Open-loop), Thor bắt buộc phải trang bị các công tắc hành trình quang học (Optical Endstops) ở mỗi khớp để “dò gốc” (Homing) mỗi khi khởi động.
- Hạn chế kỹ thuật:
- Quá trình lắp ráp và căn chỉnh hộp số in 3D cực kỳ phức tạp. Nếu in không chuẩn, hộp số sẽ bị kẹt hoặc trượt bước.
- Trọng lượng bản thân cánh tay rất nặng, quán tính lớn khi di chuyển nhanh.
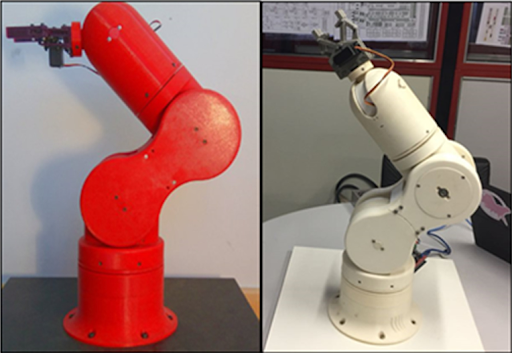
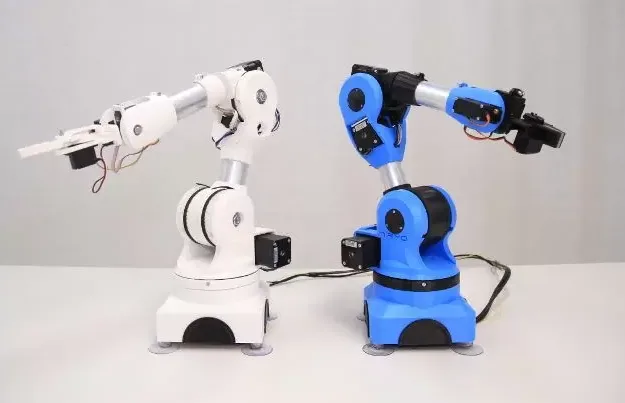
3. Phân khúc Chuyên nghiệp: Niryo One / Niryo Ned (Tiêu chuẩn R&D và Giáo dục Đại học)
Niryo là một startup của Pháp đã thương mại hóa thành công dự án nguồn mở của mình. Cánh tay Niryo (bản One dùng nhựa in 3D, bản Ned nâng cấp bằng nhôm) là tiêu chuẩn vàng trong các phòng thí nghiệm tự động hóa tại các trường đại học nhờ việc tích hợp sâu hệ điều hành ROS.
- Đặc điểm cơ khí:
- Là một “Cobot” (Collaborative Robot – Robot cộng tác) 6 DOF đúng nghĩa. Thiết kế tinh gọn, giấu hoàn toàn dây điện vào bên trong trục, mang tính thẩm mỹ cực cao.
- Hệ thống truyền động sử dụng đai răng (Timing belt) kết hợp động cơ bước, giúp chuyển động cực kỳ êm ái và không có độ rơ.
- Nền tảng phần cứng phân cấp (Hardware Architecture):
- Tầng cao (Tính toán): Sử dụng máy tính nhúng Raspberry Pi 4. Đây là “bộ não” thực thụ, chịu trách nhiệm chạy hệ điều hành Ubuntu và ROS (Robot Operating System). Nó sẽ trực tiếp giải quyết các bài toán ma trận Động học nghịch (Inverse Kinematics) và lập trình quỹ đạo nội suy phức tạp.
- Tầng thấp (Thực thi): Sử dụng một bo mạch vi điều khiển (dựa trên chip ARM hoặc Arduino Mega) đóng vai trò nhận tọa độ từ Raspberry Pi và xuất xung chính xác tuyệt đối xuống các động cơ bước. Động cơ của Niryo là loại nhúng sẵn vi điều khiển từ tính (Magnetic Encoder) để chạy vòng kín (Closed-loop), tự động sửa lỗi nếu bị trượt bước.
- Môi trường phần mềm (Software Ecosystem):
- Cung cấp phần mềm Niryo Studio cực kỳ chuyên nghiệp. Hỗ trợ lập trình kéo thả (Blockly) cho người mới, lập trình Python/C++ cho sinh viên, và giao tiếp chuẩn công nghiệp Modbus TCP/IP, TCP Socket để kết nối với các dây chuyền PLC thật trong nhà máy.
- Tích hợp sẵn tính năng “Learning Mode”: Người dùng dùng tay kéo robot đến vị trí cần thiết, hệ thống sẽ tự động ghi nhớ tọa độ để lặp lại.
- Hạn chế kỹ thuật:
- Mặc dù phần mềm là mã nguồn mở, nhưng bo mạch điều khiển động cơ (Custom Stepper Driver) và các linh kiện phần cứng được tùy biến riêng khiến việc người dùng tự sao chép (clone) 100% dự án này từ con số không là cực kỳ khó khăn và đắt đỏ. Mức giá thương mại của một bộ Niryo Ned hoàn chỉnh lên tới hàng ngàn USD.
Để lại một bình luận