Bài viết
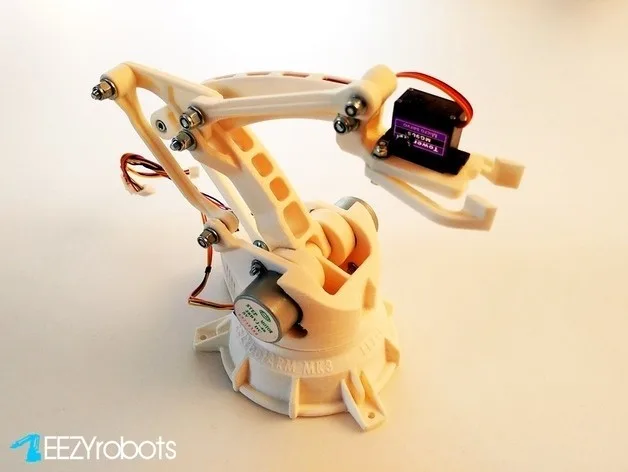
Hướng dẫn chế tạo Cánh tay Robot EEZYbotARM
Hướng dẫn toàn tập chế tạo Cánh tay Robot EEZYbotARM: Từ lý thuyết cơ điện tử đến thực hành lắp ráp Dự án EEZYbotARM là một trong những...
Khối danh mục
Các vấn đề liên quan Robotics
Bài viết
Hướng dẫn toàn tập chế tạo Cánh tay Robot EEZYbotARM: Từ lý thuyết cơ điện tử đến thực hành lắp ráp Dự án EEZYbotARM là một trong những...
Bài viết
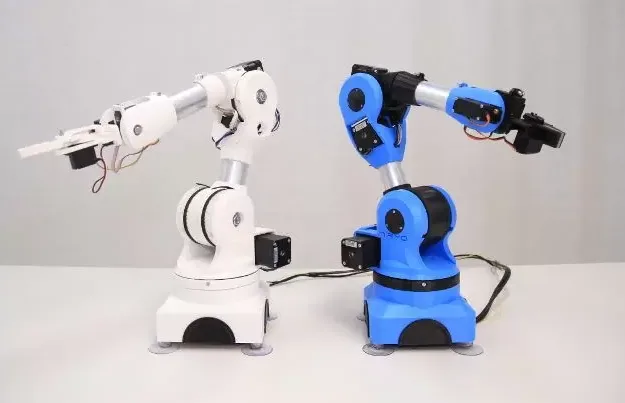
Các mô hình Cánh tay Robot Công nghiệp điển hình: Articulated, SCARA và Delta Trong kỷ nguyên Công nghiệp 4.0, cánh tay robot không chỉ đơn thuần là...
Bài viết
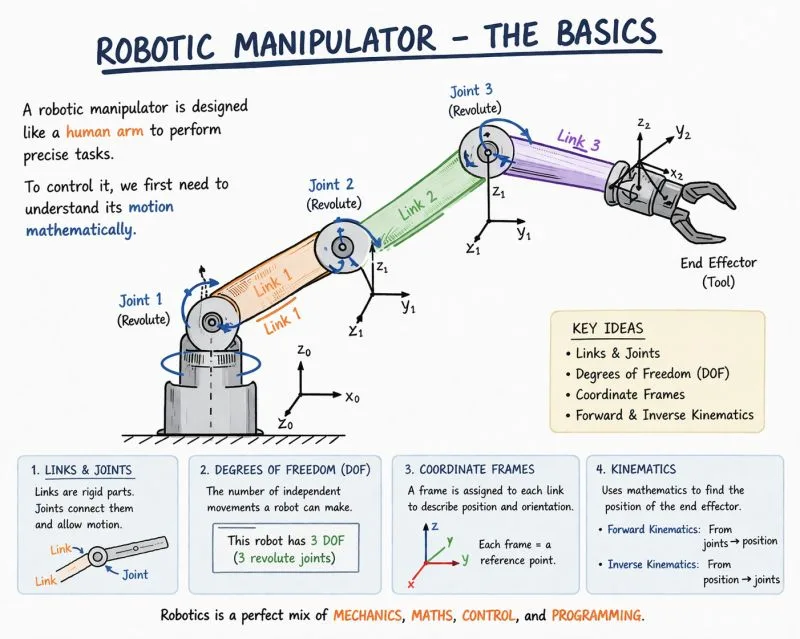
Phần 1: Điều khiển Cánh tay Robot (Robotic Manipulator) 1. Các khái niệm Cơ học cốt lõi Links (Khớp nối) và Joints (Khớp chuyển động): Links: Các thanh...
Bài viết
3 hệ sinh thái Cánh tay Robot mã nguồn mở: Từ nhập môn đến chuẩn công nghiệp Trong cộng đồng điện tử và chế tạo (Maker), việc tự...
Phương pháp đo lường điện trở vi mô sử dụng 4 dây dẫn độc lập (2 dây cấp dòng, 2 dây đo áp) để triệt tiêu hoàn toàn sai số trở kháng dây đo.