
Góc STEM Học Sinh 2 Bài 5: Chế tạo Robot bọ ngựa (Jitterbug) từ động cơ rung và kẹp giấy
Góc STEM – Khơi dậy đam mê kỹ sư nhí (Dành cho tuổi 7 – 12)
Chào mừng các bậc phụ huynh và các kỹ sư nhí chính thức bước vào Cấp độ 3 của chuyên mục STEM trên banhangdientu.com!
Ở các cấp độ trước, chúng ta đã học cách điều khiển dòng điện và giao tiếp với máy tính. Bắt đầu từ cấp độ này, chúng ta sẽ bước vào thế giới của Động lực học và Cơ khí. Dự án mở màn sẽ là Robot bọ ngựa (Jitterbug hay Vibrobot).
Đây là một chú robot siêu nhỏ, không cần lập trình, không cần bánh xe nhưng lại có thể chạy nhảy hỗn loạn cực kỳ vui nhộn chỉ bằng 3 linh kiện vô cùng đơn giản.
Phần 1: Nguyên lý Khoa học – Làm sao robot di chuyển khi không có bánh xe?
Để trả lời câu hỏi này, chúng ta cần tìm hiểu linh kiện quan trọng nhất của bài học: Động cơ rung mini.
Các bé có bao giờ tự hỏi điều gì làm cho chiếc điện thoại của bố mẹ có thể rung lên khi có cuộc gọi đến? Bên trong điện thoại (và cũng là linh kiện chúng ta sắp dùng) có chứa một chiếc động cơ DC (động cơ điện một chiều) siêu nhỏ.
Tuy nhiên, nó có một điểm đặc biệt: Khối lượng quay lệch tâm (ERM – Eccentric Rotating Mass).
- Ở các động cơ xe đồ chơi thông thường, trục quay được gắn vào một bánh xe tròn đều, giúp nó quay êm ái.
- Ở động cơ rung, trục quay lại được gắn một cục kim loại hình bán nguyệt (bị khuyết một nửa). Khi động cơ quay với tốc độ cực nhanh (hàng ngàn vòng/phút), sự mất cân bằng trọng lượng này tạo ra một lực văng ly tâm liên tục thay đổi hướng, khiến toàn bộ khối động cơ bị rung bần bật.
Chuyển đổi rung động thành chuyển động (Động năng): Khi chúng ta gắn động cơ rung này lên một bộ khung có các “cái chân” (kẹp giấy) và đặt xuống bàn. Những rung động liên tục sẽ làm các chân này liên tục nảy lên rồi đập xuống mặt bàn. Kết hợp với lực ma sát và độ nghiêng của chân, chú robot sẽ bị đẩy trượt đi theo những quỹ đạo ngẫu nhiên không thể đoán trước.
Phần 2: Chuẩn bị Vật tư (Linh kiện Điện tử & Cơ khí)
Dự án này sử dụng những linh kiện có giá thành cực rẻ, dễ dàng tìm mua tại các tiệm linh kiện điện tử hoặc tận dụng từ đồ chơi cũ.
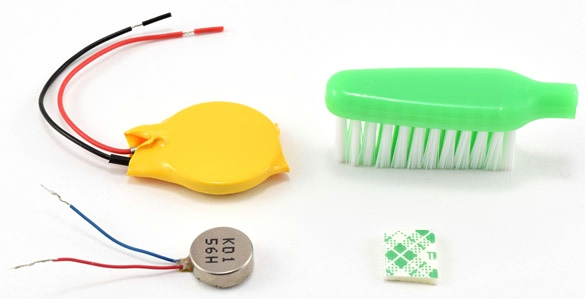
- 1x Động cơ rung mini (Micro Vibration Motor): Có hai loại phổ biến là loại hình trụ nhỏ (pager motor) hoặc loại dẹt như cúc áo (coin motor). Nên chọn loại dùng điện áp 3V.
- 1x Viên pin cúc áo CR2032 (3V): Đóng vai trò là nguồn năng lượng an toàn.
- 3-4 chiếc kẹp giấy bằng kim loại: Sẽ được uốn cong để làm chân robot. (Mẹo: Có thể thay thế bằng đầu bàn chải đánh răng cũ để robot chạy mượt hơn).
- Băng keo xốp hai mặt (Foam Tape): Cực kỳ quan trọng để dán dính các linh kiện lại với nhau.
- Tùy chọn: Mắt googly (mắt nhựa đồ chơi) hoặc giấy màu để trang trí robot.
Phần 3: Các bước Lắp ráp Robot Bọ ngựa
Dự án này không cần dùng đến mỏ hàn, các bé có thể thực hiện hoàn toàn bằng tay và sự hỗ trợ cắt keo từ phụ huynh.
Bước 1: Chế tạo bộ khung và chân (Khung xương cơ khí)
- Lấy băng keo xốp hai mặt cắt thành một miếng vuông nhỏ (khoảng 2×2 cm). Đây sẽ là “thân” của bọ ngựa.
- Lấy 3 chiếc kẹp giấy, bẻ cong nhẹ chúng thành hình chữ V hoặc chữ L để tạo thành 6 cái chân.
- Dán chặt phần lưng của các kẹp giấy vào một mặt của miếng băng keo xốp. Hãy cố gắng dàn đều các chân ra xung quanh để bọ ngựa có thể đứng vững trên mặt bàn mà không bị lật.
Bước 2: Gắn “Trái tim” và “Cơ bắp”
- Lột lớp giấy bảo vệ ở mặt còn lại của miếng băng keo xốp.
- Đặt viên pin CR2032 nằm phẳng lên trên mặt keo đó (Lưu ý: Để mặt có dấu cộng (+) hướng lên trên). Viên pin sẽ đóng vai trò là khung gầm vững chắc.
- Cắt thêm một miếng băng keo xốp nhỏ xíu, dán lên mặt trên của viên pin, sau đó dán Động cơ rung lên đó. (Nếu dùng động cơ rung hình trụ, hãy để phần cục tạ quay lệch tâm thò ra ngoài rìa để nó không bị kẹt khi quay).
Bước 3: Đấu nối Mạch điện và Khởi động Động cơ rung thường có 2 sợi dây điện nhỏ (Đỏ và Xanh/Đen). Động cơ này không phân biệt cực âm dương, nối chiều nào nó cũng rung.
- Tạo công tắc: Dùng một miếng băng keo trong (hoặc keo điện) dán chặt sợi dây màu Xanh/Đen xuống mặt dưới (Cực Âm) của viên pin.
- Khởi động: Khi muốn bọ ngựa chạy, các bé chỉ cần lấy sợi dây màu Đỏ, ép chặt nó vào mặt trên (Cực Dương +) của viên pin và dán băng keo lại.
- Ngay lập tức, mạch điện khép kín, động cơ sẽ quay tít và chú robot bọ ngựa của chúng ta sẽ bắt đầu nhảy múa loạn xạ trên mặt bàn!
Phần 4: Góc Kỹ sư – Tinh chỉnh và Gỡ lỗi (Debugging)
Làm cho bọ ngựa chạy được là dễ, nhưng làm cho nó chạy theo ý muốn mới là kỹ năng thực sự của một kỹ sư! Nếu robot của bé chỉ đứng một chỗ và xoay tròn, hãy thử các cách tinh chỉnh cơ học sau:
- Điều chỉnh Trọng tâm (Center of Gravity): Nếu robot bị lật, nghĩa là trọng tâm đang quá cao hoặc bị lệch. Hãy thử dời vị trí cục pin hoặc động cơ ra giữa thân hơn.
- Góc nghiêng của chân: * Nếu các chân kẹp giấy đâm thẳng góc 90 độ xuống bàn, robot sẽ chỉ nảy lên nảy xuống tại chỗ.
- Hãy bẻ các chân hơi nghiêng về cùng một hướng (khoảng 45 độ) ra phía sau. Lực ma sát bất đối xứng sẽ đẩy robot tiến về phía trước giống như cách chúng ta chèo thuyền!
- Giảm thiểu độ cứng: Kẹp giấy kim loại đôi khi quá trơn trượt trên mặt bàn gỗ. Hãy thử bọc một chút keo nến hoặc cắm những cục tẩy bút chì mini vào đầu kẹp giấy để tăng độ bám.
Nguồn tài liệu tham khảo các dự án tương tự :
- Dự án khoa học Bristlebot/Vibrobot từ tổ chức giáo dục Science Buddies: Build a Bristlebot (Vibrating Robot)

Để lại một bình luận