
Các mô hình Cánh tay Robot Công nghiệp điển hình: Articulated, SCARA và Delta
Trong kỷ nguyên Công nghiệp 4.0, cánh tay robot không chỉ đơn thuần là công cụ thay thế sức người, mà đã trở thành xương sống của mọi dây chuyền tự động hóa. Tùy thuộc vào yêu cầu về tải trọng (payload), tốc độ, và không gian làm việc (workspace), các kỹ sư sẽ lựa chọn những cấu trúc cơ khí khác nhau.
Dưới đây là bài phân tích kỹ thuật chuyên sâu về 3 mô hình cánh tay robot công nghiệp phổ biến nhất hiện nay: Articulated (Cánh tay đa khớp), SCARA và Delta.
1. Articulated Robot (Cánh tay robot đa khớp)
Đây là hình ảnh mang tính biểu tượng nhất khi nhắc đến robot công nghiệp. Thiết kế của Articulated Robot được mô phỏng trực tiếp từ cấu trúc giải phẫu của cánh tay người, mang lại sự linh hoạt tối đa trong không gian 3 chiều.
- Cấu trúc và Đặc tính Cơ học:
- Bậc tự do (DOF): Tiêu chuẩn công nghiệp cho dòng máy này là 6 bậc tự do (6 DOF), bao gồm các trục xoay tương ứng với: eo (thân đế), vai, khuỷu tay và 3 trục tại cổ tay (Roll, Pitch, Yaw). Nhờ cấu trúc này, điểm tác động cuối (End Effector) có thể tiếp cận một tọa độ trong không gian từ bất kỳ góc nghiêng nào.
- Động học (Kinematics): Thuộc nhóm chuỗi động học mở (Serial Kinematics), nơi mỗi liên kết (link) được nối tiếp với nhau. Nhược điểm của thiết kế này là sai số cơ khí sẽ bị cộng dồn từ gốc đến ngọn, và toàn bộ trọng lượng của các khớp phía trước đều đè lên các động cơ ở khớp gốc, đòi hỏi động cơ trục 1 và trục 2 phải có mô-men xoắn (Torque) cực kỳ lớn.
- Đại diện thương hiệu:
- Nhóm “Tứ đại gia” (Big Four) trong ngành robot công nghiệp bao gồm: KUKA (Đức), Yaskawa (Nhật Bản), FANUC (Nhật Bản), và ABB (Thụy Sĩ).
- Ứng dụng thực tiễn:
- Trọng tâm của Articulated Robot là khả năng chịu tải nặng và tầm với xa. Chúng được ứng dụng chủ lực trong ngành công nghiệp chế tạo ô tô (hàn điểm, hàn hồ quang khung gầm), dây chuyền sơn tĩnh điện (nhờ khả năng uốn lượn cổ tay để phun sơn vào các góc khuất), và bốc xếp hàng hóa nặng (Palletizing) tại các kho bãi.

2. SCARA Robot (Selective Compliance Assembly Robot Arm)
SCARA (Cánh tay robot lắp ráp có độ tuân thủ chọn lọc) là một kiệt tác của kỹ thuật cơ điện tử, được thiết kế chuyên biệt để giải quyết các bài toán lắp ráp chi tiết nhỏ với tốc độ và độ chính xác cực cao.
- Cấu trúc và Đặc tính Cơ học:
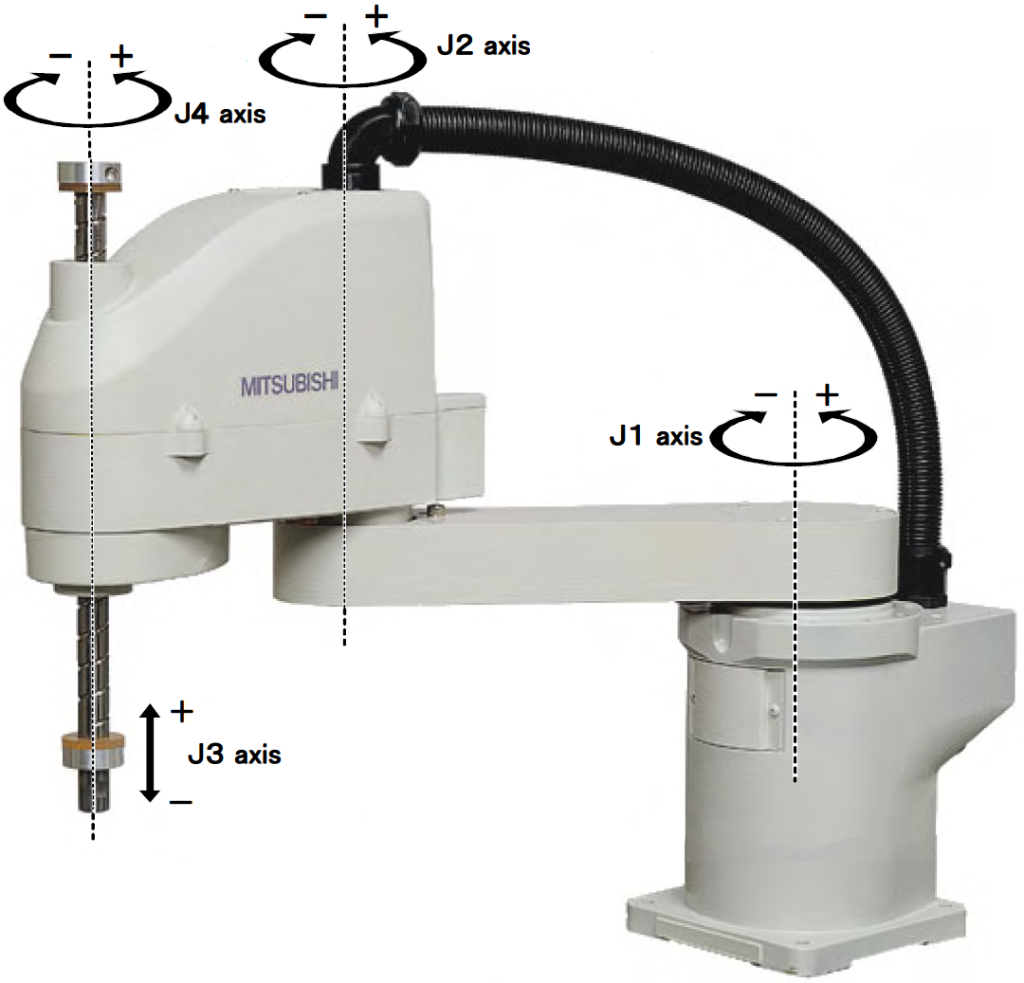
- Bậc tự do (DOF): Thường có 4 bậc tự do. Điểm độc đáo nhất của SCARA nằm ở chỗ: 3 trục đầu tiên đều là trục xoay song song với nhau trên cùng một mặt phẳng ngang (trục Z). Trục cuối cùng là trục tịnh tiến (lên/xuống).
- Tính chất “Selective Compliance” (Độ tuân thủ chọn lọc): Do các trục xoay song song, cánh tay SCARA có thể uốn gập cực kỳ linh hoạt và nhanh nhẹn trên mặt phẳng X-Y, nhưng lại cứng vững tuyệt đối (không thể uốn cong) theo phương thẳng đứng (trục Z).
- Điều này mang lại lợi thế to lớn khi lắp ráp: Robot có thể nhấn các linh kiện (như cắm chip vào bo mạch) với một lực ép lớn từ trên xuống mà tay máy không hề bị võng hay sai lệch tọa độ.
- Đại diện thương hiệu:
- Các hãng công nghệ Nhật Bản thống trị hoàn toàn phân khúc này nhờ nền tảng cơ khí vi mô chính xác, tiêu biểu như: Epson, Yamaha, Denso, và Omron.
- Ứng dụng thực tiễn:
- SCARA là “vua” trong các dây chuyền lắp ráp điện tử và linh kiện bán dẫn. Nhiệm vụ chính của chúng là thao tác Gắp-Thả (Pick-and-Place), cắm linh kiện xuyên lỗ (Through-hole), dán keo viền màn hình điện thoại, hoặc vặn ốc tự động với sai số lặp lại chỉ tính bằng micromet.
3. Delta Robot (Robot nhện song song)
Nếu Articulated Robot mạnh về lực, SCARA mạnh về độ chính xác lắp ráp, thì Delta Robot sinh ra với một mục tiêu duy nhất: Tốc độ giới hạn cực đại.
- Cấu trúc và Đặc tính Cơ học:
- Động học song song (Parallel Kinematics): Khác biệt hoàn toàn với hai loại trên, Delta Robot không nối tiếp các khớp. Thay vào đó, nó sử dụng 3 cánh tay (hình dáng giống nhện) cùng kết nối song song từ một khung đế cố định (Base) xuống một bệ tác động chung (End Effector) ở phía dưới.
- Tối ưu hóa quán tính: Điểm thiên tài của thiết kế Delta là toàn bộ các động cơ Servo nặng nề đều được gắn cố định trên khung đế phía trên. Các cánh tay nối xuống dưới thường được làm bằng vật liệu siêu nhẹ (sợi carbon hoặc nhôm rỗng). Nhờ việc “phần chuyển động không phải cõng theo động cơ”, quán tính của cơ cấu gần như bằng không, cho phép tay gắp tăng tốc và dừng lại chớp nhoáng mà không bị rung lắc.
- Hiệu suất hoạt động:
- Tốc độ gắp thả của Delta Robot là vô đối trong ngành tự động hóa, trung bình đạt từ 150 đến hơn 300 chu kỳ/phút (chu kỳ bao gồm các bước: hạ xuống – gắp – nâng lên – di chuyển – hạ xuống – nhả). Tuy nhiên, đổi lại tốc độ, tải trọng của robot Delta thường rất thấp (chỉ từ vài chục gram đến tối đa 3-5kg).
- Ứng dụng thực tiễn:
- Nhờ tích hợp sâu với hệ thống Thị giác máy tính (Machine Vision) và băng tải chạy liên tục, Delta Robot là lựa chọn số một trong ngành công nghiệp Tiêu dùng nhanh (FMCG). Chúng đảm nhận việc phân loại thực phẩm (nhặt bánh kẹo, hoa quả hỏng), đóng gói thuốc men, hoặc sắp xếp sản phẩm vào hộp ngay trên dây chuyền đang di chuyển với tốc độ cao.

Tổng kết
Việc hiểu rõ cơ chế Động học của từng loại robot là chìa khóa để thiết kế và tối ưu hóa dây chuyền sản xuất. Articulated Robot cung cấp sức mạnh và sự linh hoạt vô hạn trong không gian đa chiều. SCARA là chuyên gia của sự cứng vững và độ chính xác trong mặt phẳng ngang. Trong khi đó, Delta Robot phá vỡ mọi giới hạn về tốc độ xử lý vật thể nhẹ. Việc lựa chọn đúng mô hình không chỉ giúp tiết kiệm chi phí đầu tư mà còn quyết định trực tiếp đến năng suất của toàn bộ nhà máy.