[[Cảm biến đo khoảng cách]]: So sánh Sóng siêu âm (HC-SR04) và Công nghệ Laser ToF (VL53L0X)
Trong thế giới nhúng và tự động hóa, việc giúp một cỗ máy “nhìn” thấy khoảng cách đến các vật thể xung quanh là bước đi đầu tiên để tạo ra trí thông minh. Để làm được điều đó, các kỹ sư thường phân vân giữa hai trường phái công nghệ hoàn toàn khác biệt: Sóng âm học đại diện bởi module siêu rẻ HC-SR04 và Quang học hiện đại đại diện bởi cảm biến Laser ToF VL53L0X.
Việc chọn sai cảm biến không chỉ làm sai lệch thuật toán mà còn khiến thiết bị hoạt động mù lòa trong các môi trường đặc thù. Hãy cùng “mổ xẻ” bản chất của hai công nghệ này.
1. [[Sóng siêu âm (Ultrasonic) – HC-SR04]]: Huyền thoại của sự đơn giản
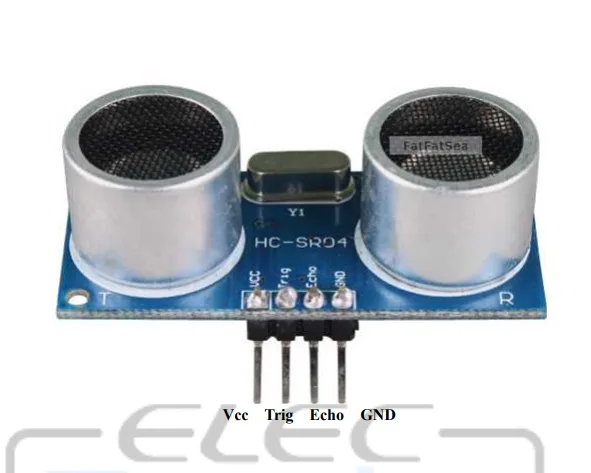
- [[Nguyên lý hoạt động]]: HC-SR04 hoạt động dựa trên nguyên lý phản xạ âm thanh (Sonar) giống như loài dơi. Mạch sở hữu hai loa: một loa phát (Trig) ra chùm sóng âm ở tần số 40kHz (vượt quá ngưỡng nghe của con người) và một loa thu (Echo). Khi sóng âm đập vào vật cản, nó sẽ dội ngược lại.Vi điều khiển sẽ tính toán khoảng cách dựa trên vận tốc âm thanh trong không khí (khoảng 340 m/s) và thời gian từ lúc phát đến lúc thu theo công thức:$$d = \frac{v \times t}{2}$$(Trong đó: $d$ là khoảng cách, $v$ là vận tốc âm thanh, $t$ là tổng thời gian đi và về).
- [[Thông số kỹ thuật nổi bật]]:
- Tầm đo hiệu quả: 2cm đến 400cm.
- Góc quét (FOV): Khoảng 15°.
- Giao tiếp: Tín hiệu Digital (Cần 2 chân GPIO cho Trig và Echo).
- [[Ưu điểm]]:
- Giá thành cực kỳ rẻ, dễ dàng thay thế.
- Không bị ảnh hưởng bởi màu sắc hay độ chói của vật thể (có thể đo tốt trong bóng tối mịt mù hoặc vật thể trong suốt như kính, nước).
- [[Điểm yếu chí mạng vật lý]]:
- Tán xạ và góc mù: Vì sóng âm tỏa ra theo hình nón, nếu đo trong môi trường chật hẹp (như ống nước hay khe cửa), sóng sẽ đập vào vách xung quanh gây nhiễu, báo sai khoảng cách.
- Khắc tinh là vật liệu mềm: Bề mặt như mút xốp, thảm nỉ, vải bông sẽ hấp thụ sóng âm thay vì dội lại. Mạch sẽ không nhận được tín hiệu Echo và báo lỗi.
- Phụ thuộc vào nhiệt độ môi trường (vận tốc âm thanh thay đổi khi nhiệt độ không khí thay đổi).
2. [[Công nghệ Laser ToF – VL53L0X]]: Sự chính xác của vận tốc ánh sáng
Time-of-Flight (ToF) là công nghệ tối tân được tích hợp trên các smartphone cao cấp để lấy nét camera hoặc quét FaceID. Module VL53L0X của STMicroelectronics mang sức mạnh đó xuống tầm giá của sinh viên và kỹ sư mạch.
- [[Nguyên lý hoạt động]]:Thay vì dùng âm thanh, VL53L0X phát ra một tia Laser hồng ngoại vô hình (bước sóng 940nm, an toàn tuyệt đối cho mắt với công nghệ VCSEL). Chùm sáng đập vào vật thể, quay trở lại và được thu nhận bởi một mảng cảm biến hạt photon siêu nhạy (SPAD).Module được tích hợp sẵn một vi xử lý cực mạnh để tính toán thời gian bay của ánh sáng, với vận tốc $c \approx 3 \times 10^8 m/s$ (nhanh gấp một triệu lần âm thanh) ở cấp độ pico-giây, sau đó xuất ra kết quả khoảng cách cuối cùng.
- [[Thông số kỹ thuật nổi bật]]:
- Tầm đo tối đa: Lên đến 200cm (trong điều kiện lý tưởng).
- Kích thước siêu nhỏ (Chỉ bằng hạt đậu).
- Giao tiếp: Chuẩn I2C (tiết kiệm chân vi điều khiển, cho phép nối nhiều cảm biến trên cùng một bus).
- [[Ưu điểm]]:
- Độ chính xác cấp mili-mét: Góc tia laser hẹp giúp nó có thể “bắn” xuyên qua các khe hở nhỏ để đo đúng mục tiêu mà không bị nhiễu bởi cảnh quan xung quanh.
- Tốc độ phản hồi cực nhanh, miễn nhiễm hoàn toàn với nhiễu âm thanh và nhiệt độ không khí.
- Không cần vi điều khiển (Arduino/ESP32) phải tự làm toán tính thời gian, module sẽ đẩy thẳng con số khoảng cách qua I2C.
- [[Điểm yếu chí mạng vật lý]]:
- Sợ ánh sáng mặt trời: Bức xạ hồng ngoại từ mặt trời làm lóa mảng cảm biến SPAD. Khi mang ra ngoài trời nắng, tầm đo của VL53L0X giảm thê thảm, thậm chí nhiễu hoàn toàn.
- Bị ảnh hưởng bởi độ phản quang: Đo một vật màu trắng (phản xạ tốt) sẽ xa và chính xác hơn đo một bề mặt sơn đen nhám (hấp thụ ánh sáng).
3. [[Bảng so sánh tổng hợp]]
| Tiêu chí | HC-SR04 (Sóng siêu âm) | VL53L0X (Laser ToF) |
| Bản chất vật lý | Sóng âm thanh (40kHz) | Ánh sáng (Laser hồng ngoại 940nm) |
| Giao tiếp | Digital (Trig / Echo) | I2C (SDA / SCL) |
| Góc quét (FOV) | ~15° (Hình nón rộng) | Rất hẹp (Điểm tia Laser) |
| Nhiễu bởi môi trường | Vật liệu xốp mềm, Gió, Nhiệt độ | Ánh nắng mặt trời, Bề mặt màu đen mờ |
| Tầm đo | 2cm – 400cm | 0cm – 200cm (Thường <120cm sẽ ổn định nhất) |
| Độ phức tạp phần mềm | Dùng hàm pulseIn(), tốn tài nguyên CPU | Giao tiếp qua I2C, IC tự tính toán |
4. [[Ứng dụng thực chiến: Chọn ai, bỏ ai?]]
- Hãy dùng HC-SR04 khi: * Bạn cần làm dự án đo mực nước/chất lỏng trong bồn chứa (bề mặt nước dội âm cực tốt).
- Làm robot tránh vật cản cơ bản trong nhà (vật cản lớn như tường, cửa).
- Dự án cần tối ưu chi phí thấp nhất có thể.
- Bắt buộc dùng VL53L0X khi:
- Bạn cần đo độ phân giải cao để đếm số lượng sản phẩm trên băng chuyền hẹp.
- Robot hút bụi cần cảm biến chống rơi cầu thang (cần đo cực nhanh và tia chiếu nhỏ chúi xuống đất).
- Thiết kế hệ thống điều khiển giao diện bằng cử chỉ tay (Gesture control) với khoảng cách gần.
- Ứng dụng gắn trên Drone/Flycam để duy trì độ cao là là mặt đất (bởi tiếng ồn cánh quạt sẽ làm nhiễu HC-SR04, trong khi Laser thì miễn nhiễm tiếng ồn).

Để lại một bình luận